A programmable logic controller (PLC) is a modern device that can control the work process in a machine or an appliance. The operations involved in the work process are carried out by actuators such as electric motors, pneumatic actuators, hydraulic actuators, etc., which are controlled by final control elements such as contactors, solenoid valves, etc. Pushbutton switches are generally used to register the intention of an operator to start or stop work operations or to apply an emergency stop. Sensors are used to detect the completion of work operations and can be used for obtaining the automatic operation of the work process. The associated input and output devices are individually connected to the PLC in the PLC-based controller.
What is a PLC?
A PLC is a digital electronic device consisting of hardware and software elements intended for interfacing with the input devices, such as pushbuttons and sensors, and output devices, such as motors and solenoid valves in the associated machine to achieve the desired control task. It can receive signals concerning the process variables as provided by the input devices, process the signals, and then energise the final control elements to control the output devices as per the software program or instructions stored in its memory.

Hardware Elements of a PLC
The PLC’s hardware part consists of a CPU, a program memory, and input/output (I/O) modules. Apart from the PLC along with its hardware elements, the associated PLC system may consist of a PC, a power supply module, a networking module, and a Human-Machine Interface (HMI).

The main function of the CPU is to make logical decisions and execute user programs. The memory loads the programs and stores data at addressed locations. The input modules must process digital and analog signals appropriate for the CPU’s electronic processing circuits. That is, they convert the input signals at the standard industrial control voltage of 24 V DC, or voltages in the range of 0 to 10 V, or currents in the range of 4 to 20 mA, or at any other levels to signals at the standard CPU voltage of 5V DC (maximum). The output modules are required to convert the output signals at the standard CPU voltage of 5V DC (maximum) to signals at the external signal levels. The power source is required to provide power to the logic circuits of the processor and the internal power needs of the I/O modules.
Hardware Design of PLCs
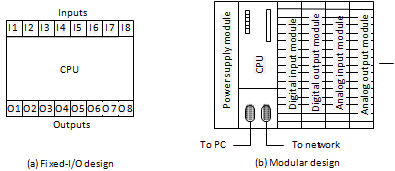
According to the arrangement of the I/O modules, the design approach for configuring the PLC system can be fixed-I/O or modular. In the fixed-I/O design, the CPU, inputs, and outputs are organized as a single unit without any scope for further modification. Further, the fixed-I/O PLC has a limited number of inputs and outputs. A PLC system can also be set up modularly by arranging the required modules on a rack per the application system requirements.
Software Elements of a PLC
The software part of a PLC is the overall software used to control not only an external system or process but also the hardware parts of the PLC. Accordingly, it consists of firmware and user programs. The firmware of the PLC is part of the software supplied by the PLC manufacturer and mainly includes the PLC operating system and at least one standard programming language. The operating system is the overall software representing all the instructions and declarations necessary for controlling the PLC system resources. Every programming language includes a comprehensive set of instructions. The user program can be written using these instructions to control a machine or process. Highly complex programs can be written easily by using a graphical programming language.
Program Scan-cycle
While processing a program in the PLC system, its CPU scans the system inputs, executes the program, and updates the system outputs cyclically. The time that is taken by the PLC in scanning one cycle is called ‘scan cycle time’.
Ladder Programming
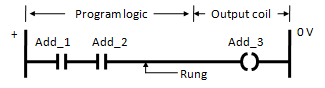
A ladder diagram (one of the PLC programming languages) uses graphic representations of programming instructions, such as contacts and coils, to obtain the required control function. The left-hand side vertical line of the ladder diagram is considered to be associated with a positive voltage, and the right-hand side vertical line is associated with 0 volt. Between these two lines, many horizontal rungs exist through which a hypothetical current (or power) is assumed to flow. Initially, the program control elements are inserted into the rungs to realize the required control logic, and then a program output coil is placed as the terminator of the rung. The ladder programming language allows PLCs to perform different tasks, including bit logic, timing, and counting functions.

Programmable Logic Controllers and Programming Concepts
Joji Parambath
Bit logic Operations in PLCs
The bit logic (Boolean) operations are provided in the PLC programming language for the bit-wise control of operations. Some important programming instructions for the bit logic operations are the ‘NO contact’, ‘NC contact’, ‘coil’, ‘set coil’, and ‘reset coil’. Each element can be brought to the selected part of a ladder rung by clicking the program element from the electronic program element catalogue provided in the PLC software.
[Please note: A hypothetical addressing format is used in this article to explain the concepts. The exact addressing format depends on the type and make of the PLC.]
NO Contact, PLC
The NO contact has an ‘address’ part for specifying the address of the associated input device, the output device or some other internal programming element, like a timer. At the specified bit address, the NO contact scans for the signal state ‘1’ (ON). Power is assumed to flow through the NO contact if the scanned bit address has the signal state ‘1’. This contact scans the ‘high’ signal state of the input device, output device, or internal programming element.

NC Contact, PLC
The NC contact has an ‘address’ part for specifying the address of the associated input device, the output device, or other internal program element. The NC contact scans for the signal state ‘0’ (OFF) at the specified bit address. Power is assumed to flow through the NC contact if the scanned bit address has the signal state ‘0’. This contact scans the ‘low’ signal state of the input device, output device, or internal programming element.

Coil, PLC
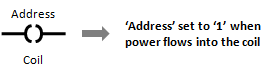
The coil has an ‘address’ part that specifies the address of the associated output device. It acts as an interface between the CPU and the output device. That is, when conventional power flows into the coil, the specified bit address is set to the signal state ‘1’, and the PLC delivers energy to the output device.
Example 1: Basic Programming
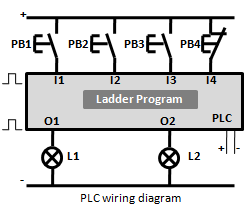
A PLC is connected with three NO pushbuttons (PB1, PB2, and PB3) at the input addresses I1, I2, and I3 respectively and an NC pushbutton (PB4) at the input address I4, as shown in the wiring diagram. It is also connected with two lamps, L1 and L2, at the output addresses O1 and O2. Analyse the given typical ladder programs along with the descriptions to understand the basic operation of the PLC.
Ladder Diagram 1.1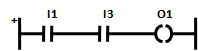
- The first NO contact scans for the ‘1’ state of the input at the address I1. This state occurs when the associated pushbutton PB1 is pressed.
- The second NO contact scans for the ‘1’ state of the input at the address I3. This state occurs when the associated pushbutton PB3 is pressed.
- The output at the address O1 turns to the ‘1’ state, and hence, the associated output L1 gets energized when the series connected input addresses (I1 and I3) turn to the ‘1’ state simultaneously.
Ladder Diagram 1.2
- The NO contact scans for the ‘1’ state of the input at the address I4. This state occurs when the associated pushbutton PB4 remains in the normal position. When the NC pushbutton PB4 is not pressed, the output at the address O2 turns to the ‘1’ state as per the ladder diagram, and hence the associated lamp L2 gets energized.
- When the pushbutton PB4 is pressed, the state of I4 turns to the ‘0’ state, the state of O2 turns to the ‘0’ state, and hence the lamp L2 gets de-energized.
Ladder Diagram 1.3
- The output address O1 turns to the ‘1’ state (when the input at the address I1 turns to the ‘1’ state and the input at the address I2 turns to the ‘0’ state) or (when the input at the address I1 turns to the ‘0’ state and the address at the input I2 turns to the ‘1’ state). For the ON condition of the lamp L2, this exclusive OR logic occurs when PB1 is pressed, PB2 is not pressed, or PB1 is not pressed, and PB2 is pressed.
Ladder Diagram 1.4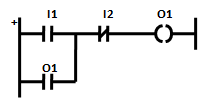
- When the input I1 is momentarily set to the ‘1’ state (PB1 is pressed and released), the output O1 is set to the ‘1’ state (lamp L2 glows). The output O1 remains in the ‘1’ state even if the signal to the input I1 is not present. By setting the input I2 to the ‘1’ state momentarily (PB2 is pressed and released), the output O1 remains reset (lamp L2 remains in the off state). This program implements the memory program.
Timers, PLC
PLC timer instructions are used to implement time-based operations in various applications. The time specifications for PLC timers are stored in the addressed locations. The timer instruction has a ‘start’ input for running the timer and a ‘time value’ input for specifying the required time duration. The desired time duration can be specified in hours, minutes, seconds, milliseconds, or an appropriate time base, usually embedded in a unique format. The status of the timer can be taken from the ‘output’. The timer instruction also has a resetting feature. A PLC may include many timer instructions, such as the on-delay type, off-delay type, retentive on-delay type, pulse type, etc.
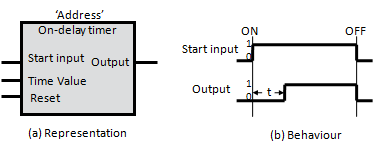
On-delay Timer, PLC
A hypothetical representation of the on-delay timer with its essential parameters and its behaviour is given in the figure. The timer has an ‘address’ part that specifies its address location in the memory. The timer starts running when a signal is applied to its ‘Start input’. The signal state of the timer output changes from ‘0’ to ‘1’ when programmed time ‘t’ has elapsed with reference to the change of state of the ‘start’ input from the ‘0’ state to the ‘1’ state (ON). But the signal state of the timer output changes from the ‘1’ state to the ‘0’ state as soon as the status of the signal at the start input changes from the ‘1’ state to the ‘0’ state (OFF) without delay.
Example 2: Delayed return motion of a hydraulic cylinder using a PLC
A double-acting hydraulic cylinder is employed in a pressing machine. A 4/2-DC double solenoid valve acts as the final control element of the cylinder. When a pushbutton (PB1) is pressed, the cylinder is extended. The cylinder must remain in its forward end position for 10 seconds. It should then return to its home position automatically. All the input and output devices are connected to the PLC. You may analyze the hydraulic circuit, PLC wiring diagram, and Ladder program to better understand the PLC-controlled hydraulic system.
The double-acting cylinder’s hydraulic circuit consists of the 4/2-way double solenoid valve with coils Y1 and Y2. The PLC wiring diagram shows the connection of the pushbutton (PB1) and the sensor (S2) connected to the input of the PLC at addresses I1 and I2, respectively, and the solenoid coils Y1 and Y2 to the output of the PLC at addresses O1 and O2 respectively. The ladder diagram to realize the control task is also given. An on-delay timer (ODT) instruction is used to obtain the delayed return motion of the cylinder. Let T1 be the address of the timer. The delay time of 10s is specified at the timer’s time value (TV) input.
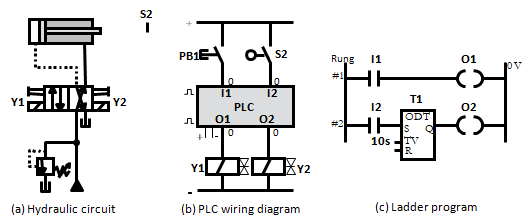
When PB1 is pressed momentarily, the signal state of the address I1 changes from ‘0’ to ‘1’ and consequently, the signal state of the output address O1 changes from ‘0’ to ‘1’, as per the program at the rung 1 of the Ladder diagram. The coil Y1 is energized, causing the forward actuation of the solenoid valve and, hence, the extension of the cylinder. When the cylinder reaches its forward end position, the limit switch S2 is pressed automatically, and its signal state is turned to ‘1’. The signal from the sensor S2 acts as the start input for the timer (T1). The signal state of the timer changes from ‘0’ to ‘1’ when the specified time (10s) has elapsed, and consequently, the signal state of the output address O2 turns to ‘1’, as per the program at the rung 2 of the Ladder diagram. The coil Y2 is thus energized, causing the solenoid valve’s return actuation and the cylinder’s delayed automatic retraction.
Memory Elements, PLC
A PLC is provided with bit memory locations (flags) for storing intermediate results during a program execution. Each memory location can be set or reset by using a set or reset coil, respectively. A box instruction with the combined set and reset instructions may also be available in the instruction set of a PLC. Let M1, M2, M3, etc., be the hypothetical addresses of the bit memory locations in the data memory.
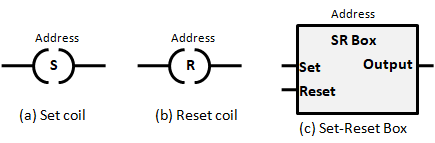
If power flows to the input of the set coil, the signal state of the addressed bit memory location is set to ‘1’. The state of the memory address remains the same even if no power subsequently goes to the set input. If the power flows to the input of the reset coil, the signal state of the addressed memory location is reset to ‘0’. The state of the memory address remains the same even if no power subsequently goes to the reset input. That means the coil can remember the last signal given. An NO or NC program instruction can access the addressed memory output.
Example 3: Continuous back-and-forth motion of a pneumatic cylinder using a PLC
When a start pushbutton is pressed, a double-acting pneumatic cylinder is to perform a continuous back-and-forth motion until a stop pushbutton is pressed. The cyclic operation should always stop with the cylinder in the retracted position. A 5/2-DC double solenoid valve is used as the final control element, and a PLC is used as the controller. All the input and output devices are connected to the PLC. You may analyze the pneumatic circuit, PLC wiring diagram, and Ladder program to better understand the PLC-controlled pneumatic system.
The figure shows the pneumatic circuit for the cyclic operation of the double-acting pneumatic cylinder with the 5/2-way double solenoid valve having coils Y1 and Y2. The coil Y1 controls the forward motion of the cylinder, and coil Y2 controls the return motion of the cylinder. Pushbuttons PB1 and PB2 are used to get the start and stop controls, respectively. The pushbutton PB1 is connected to the PLC at the address I1, and the pushbutton PB2 is connected to the PLC at the address I2. The limit switch S1 and the proximity sensor S2 are used to fully automate the operation of the cylinder. These sensors are positioned for actuation at the retracted and extended positions of the cylinder, respectively. The sensor S1 is connected to the PLC at the address I3, and the sensor S2 is connected to the PLC at the address I4. The sensor S1 is actuated in the initial position of the cylinder. The coil Y1 is connected to the PLC at the address O1, and the coil Y2 is connected to the PLC at the address O2. The figure also shows the PLC wiring diagram. The ladder program to realize the control task is also given.
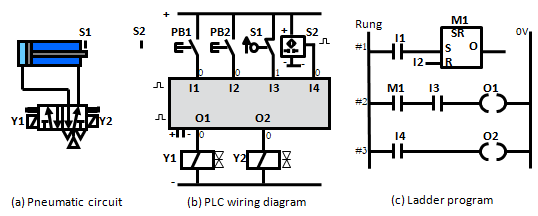
The cyclic operation of the pneumatic cylinder can be obtained just by using the sensor signal S1 (address I3) controlling solenoid coil Y1 (address O1) through the program as shown in rung 2 of the Ladder program and the sensor signal S2 (address I4) controlling the solenoid coil Y2 (address O2) through the program as indicated at the rung 3 of the Ladder program. The ‘start’ and ‘stop’ controls for the cyclic operation of the cylinder can be realized by introducing a memory element (flag) with the address ‘M1’. The memory location can be set by the momentary actuation of the pushbutton PB1 (address I1) and reset by the momentary actuation of the pushbutton PB2 (address I2), through the program as shown at the rung 1 of the ladder program. The signal state of the memory element M1, accessed through an NO contact, is logically combined in series with the signal state of the sensor S1 (address I3), as shown at rung 2, to control the coil Y1 (address O1).
Example 4: PLC-controlled Automatic Washing Machine
A washing machine has to carry out a sequence of operations like washing, rinsing, and drying automatically when a start pushbutton is pressed. The appliance uses a motor to run the agitator of the washing machine, a pump for the water inlet, and a pump for draining the water out. A simplified sequence of operations is as follows: the inlet water pump is ON for 30s. Then, the agitator motor runs for 20 s. Next, the output pump is ON for 25s. You may analyze the Timing Diagram and the Ladder program to better understand the PLC-controlled automatic washing machine.
The PLC wiring diagram shows that the ‘start’ pushbutton PB1 is connected to the input of the PLC at the address I1. The final control elements K1, K2, and K3 of the inlet pump, agitator motor, and drain pump are connected to O1, O2, and O3, respectively.
The wash, rinse and drying operations in a washing machine have to be carried out in a timed sequential manner. This fact implies that three timers must be started sequentially to obtain the operations with the necessary timings (Pl. see the programs at rungs 2, 3, and 4). The solution to this problem may be obtained in many ways. A better approach may be to develop a timing diagram for the sequence of operations. It is also possible to shape the pulses with the use of retentive timers so that the development of the program becomes easy. It may be noted that a retentive timer needs to be reset once it goes to the ‘1’ state. This timing diagram approach will benefit advanced automatic washing machines with complex requirements and crossed-linked logic.
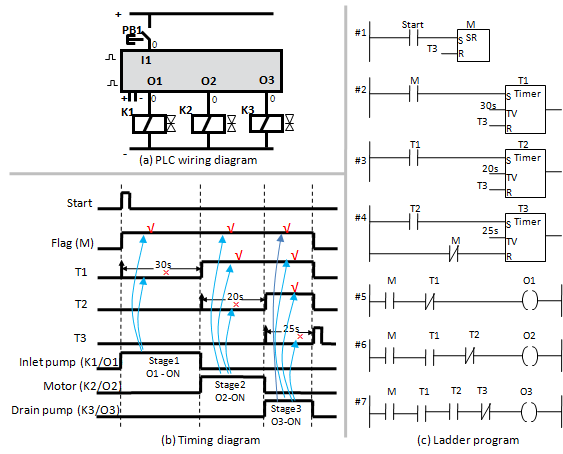
A memory flag ‘M’ is set during the entire period of the sequential operations for the convenience of programming (Pl. See the timing diagram and the program at rung 1).
The programs for the inlet pump, agitator motor, and drain pump can be written with the help of a timing diagram. The timing diagram shows that the control logic for the ON state of the inlet pump, agitator motor, and drain pump can be obtained by associating relevant signals (as marked by the blue lines) at stage 1, stage 2, and stage 3, respectively. These programs are given at the rungs 5, 6, and 7.
Authored by JOJI Parambath, Founder/Director, Fluidsys Training Centre, Bangalore





")













")
















Leave a comment